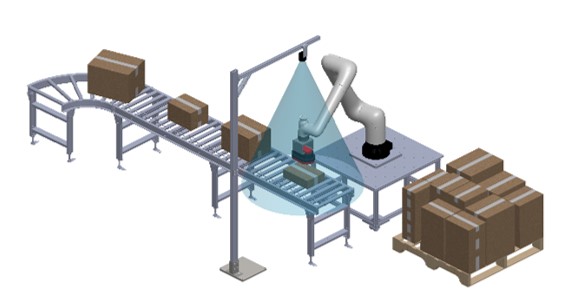
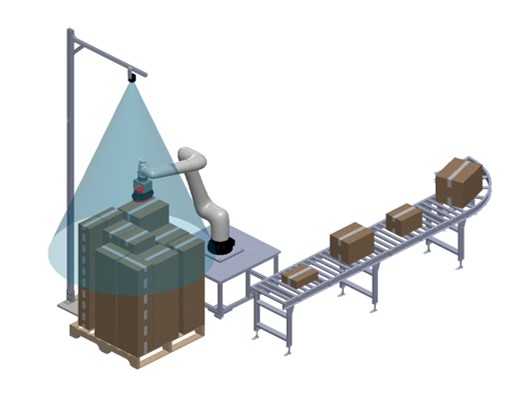
3D 카메라를 이용하여 비정형 박스의 크기와 위치를 인식하여 인공지능으로 로봇이 알아서 박스를 쌓기(Palletizing)도 하고, 꺼내기(Depalletizing)도 하게 하는 국산 프로그램입니다.
RBS의 경쟁력
사용자의 추가 티칭이 필요 없습니다. 상자가 바뀌더라도 카메라가 상자의 크기를 자동으로 인식하여 작업이 가능합니다.
카메라가 저렴합니다. 기존의 구조광 카메라나 스테레오 카메라보다 훨씬 저렴하면서도 AI가 적용된 TOF(Time Of Flight) 방식의 3D 카메라를 사용하여 가격경쟁력이 있습니다.
모든 로봇에 적용 가능합니다. 로봇과 통신하는 방식이기 때문에 로봇 회사, 종류에 관계없이 모든 로봇에 적용 가능합니다.
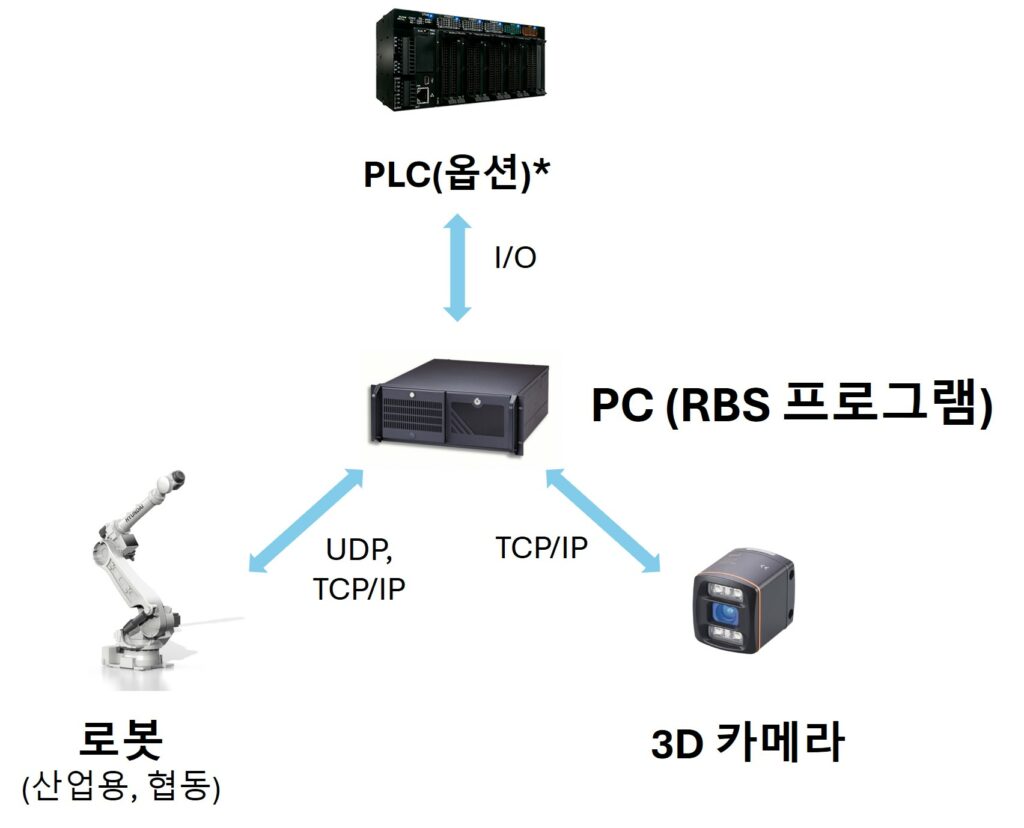
RBS 시스템 구성
PLC를 거치지 않아 통신속도가 빠르고 시스템 구성이 간단합니다.
RBS의 기술력
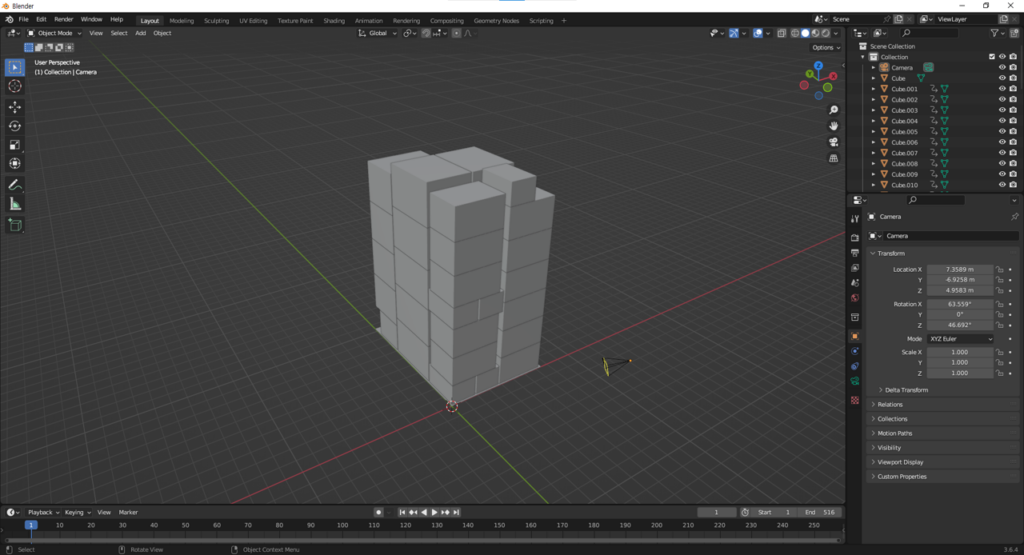
Algorithm & Simulation
RBS는 0.5초 이내로 결과를 로봇에 전달하여 실시간 응답성을 보장하며, 박스가 넘어지지 않게 쌓는 알고리즘이 적용되어 있어 1.8m 이상 안정적으로 박스를 높이 쌓을 수 있습니다.
또한 공간 효율을 최대화 하기 위해 상자를 가로로 쌓을 지 세로로 쌓을지, 혹은 혼합해서 쌓을지 사용자가 선택 가능합니다.
알고리즘 확인용 시뮬레이션 기술도 보유하고 있습니다.
적용사례 #1
RBS with Hyundai YS080L
2023년 11월 충청북도 청주에 위치한 ‘L’ 물류회사에 RBS 1Set를 납품하여 현재까지 성공적으로 운영하고 있습니다. 이 곳에서는 10여종 이상의 택배상자들이 한 컨베이어 라인에서 공급되며 RBS는 랜덤으로 공급되는 박스를 지정된 롤테이너에 최적화된 알고리즘으로 공간 효율적으로 넘어지지 않게 적재합니다. 적재가 끝난 롤테이너는 상차장으로 이동합니다.
적용사례 #2
RBS with Neuromeka NURI20C
2024년 3월 Automation World와 4월 SIMTOS에서 뉴로메카의 NURI20C 로봇으로 RBS를 이용한 비정형 랜덤 디팔레타이징(De-Palletizing), 팔레타이징(Palletizing) 솔루션을 시연했습니다.